Mühendisler 200 metre zıplayabilen robot tasarımı üzerinde çalışıyor
 Manchester Üniversitesi’ndeki mühendisler tarafından yapılan çalışmalarda bugüne kadar tasarlanmış öbür tüm atlama robotlarından daha yükseğe zıplayabilen bir tasarım ortaya çıktı. Bu dizayna nazaran robot 200 metre yüksekliğe ulaşabiliyor.
Manchester Üniversitesi’ndeki mühendisler tarafından yapılan çalışmalarda bugüne kadar tasarlanmış öbür tüm atlama robotlarından daha yükseğe zıplayabilen bir tasarım ortaya çıktı. Bu dizayna nazaran robot 200 metre yüksekliğe ulaşabiliyor. Big Ben’in iki katı yüksekliğe sıçrayabiliyor
Araştırmacılar, matematik, bilgisayar simülasyonları ve laboratuvar deneylerinin bir kombinasyonunu kullanarak, kendi boyutunun birkaç katı mahzurları aşacak kadar yükseğe zıplamasına imkan tanıyan, optimum boyut, form ve modüllerin sistemine sahip bir robotun nasıl tasarlanacağını keşfettiler.
Mevcut en yüksek atlama robotu, kendi boyutunun 110 katına muadil olan 33 metreye kadar ulaşabiliyor. Artık araştırmacılar, havada 120 metre (ya da ayda 200 metre) yüksekliğe atlayabilen bir robotun nasıl tasarlanacağını keşfettiler. Bu, Big Ben kulesinin iki katından daha yüksek bir yüksekliğe denk geliyor.
Bu ilerleme, gezegen keşiflerinden afet kurtarmaya, tehlikeli yahut erişilemeyen alanların nezaretine kadar çeşitli uygulamalarda ihtilal yaratacak. Manchester Üniversitesi Uzay Robotiği Araştırma Vazifelisi Dr John Lo, “Robotlar klasik olarak tekerlekler üzerinde yuvarlanarak yahut yürümek için bacakları kullanarak hareket edecek halde tasarlanmıştır.
Ancak atlama, arazinin zorlandığı yerlerde seyahat etmenin tesirli bir yolunu sağlar. Atlayan robotlar halihazırda mevcut olsa da, bu atlama makinelerinin dizaynında birçok büyük zorluk vardır. Bunlardan en kıymetlisi, büyük ve karmaşık manilerin üstesinden gelebilecek kadar yükseğe zıplamaktır. Dizaynımız, yay tahrikli atlama robotlarının güç verimliliğini ve performansını kıymetli ölçüde artıracaktır.” dedi.
Araştırmacılar, klasik atlama robotlarının çoklukla depoladıkları yay gücünü büsbütün hür bırakmadan havalandığını, bunun da verimsiz atlamalara neden olduğunu ve azamî yüksekliklerini sınırladığını buldu. Ayrıyeten, üste yanlışsız hareket etmek yerine yan yana hareket ederek yahut dönerek güç israf ettiklerini de buldular.
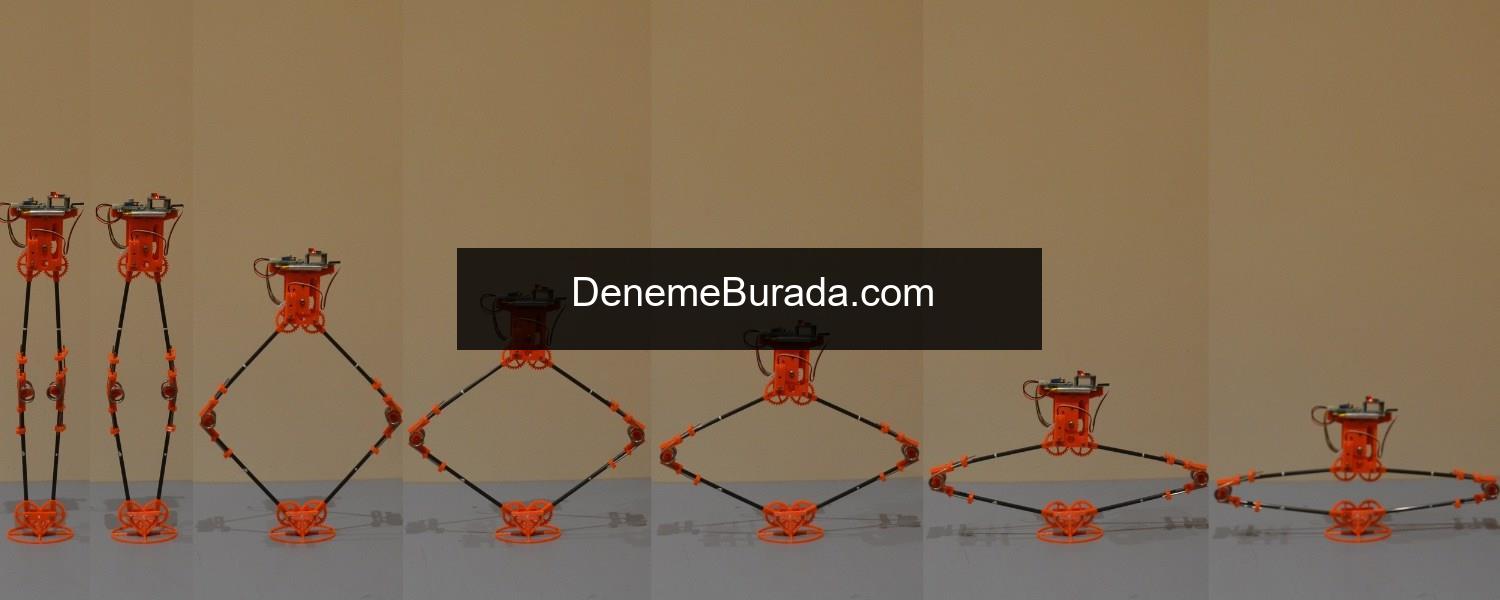
Yeni dizaynlar, gerekli yapısal güç ve sağlamlığı korurken bu istenmeyen hareketleri ortadan kaldırmaya odaklanmalıdır. Havacılık ve Uzay Mühendisliği Kıdemli Öğretim Görevlisi Dr. Ben Parslew, “Robotun formu hakkında cevaplanması gereken pek çok soru ve verilmesi gereken kararlar vardı. Örneğin bir kanguru üzere yerden itecek bacakları olmalı mı, yoksa daha çok dev bir yaya sahip tasarlanmış bir pistona mı benzemeli?
Elmas üzere kolay simetrik bir hal mi olmalı, yoksa daha kavisli ve organik bir şey mi olmalı? Akabinde, buna karar verdikten sonra robotun boyutunu düşünmeliyiz. Küçük robotlar hafif ve çeviktir lakin büyük robotlar daha güçlü sıçramalar için daha büyük motorlar taşıyabilir yani en âlâ seçenek ortada bir yerde mi?
Yapısal yine dizaynlarımız, robotun bileşen kütlesini üste hakikat yine dağıtıyor ve yapıyı aşağıya hakikat inceltiyor. Daha hafif bacaklar, prizma formundaki ve sırf esneyen yayların kullanılması, zıplayan robotun performansını ve en değerlisi güç verimliliğini artırdığını gösterdiğimiz özelliklerdir.” dedi.
Araştırmacılar performansı kıymetli ölçüde artırmak için uygulanabilir bir tasarım seçeneği bulmuş olsalar da, bir sonraki amaçları atlamaların tarafını denetim etmek ve robotun tek bir seferde yapabileceği atlama sayısını artırmak için inişinden kaynaklanan kinetik enerjiyi nasıl kullanacağını bulmaktır.





